







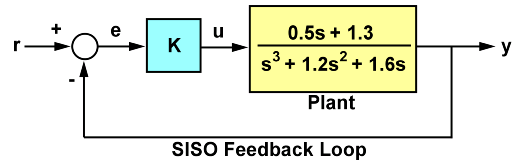
 Regelkreis
Regelkreis
Matlab
N=[.5 1.3];
D=[1 1.2 1.6 0]; % s*(s²+1.2s+1.6)
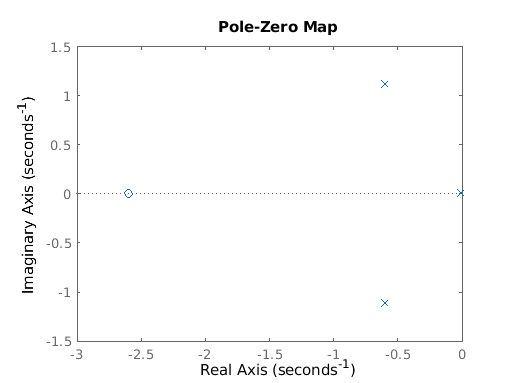
D_neu=conv([1 0.01],[1 1.2 1.6]); % der Pol wird um -0.01 verschoben (s+0.01)*(s²+1.2s+1.6)
G = tf(N,D_neu);
pzmap(G);
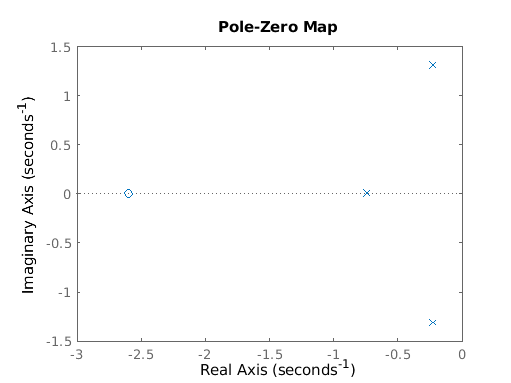
T = feedback(G,1); %closed loop gain K=1
pole(T)
ans = 3×1 complex3×1 complex
-0.2323 + 1.3083i
-0.2323 - 1.3083i
-0.7453 + 0.0000i
stabil, alle Pole in der linken Halbebene
pzmap(T)
bis zu welchem k ist diese Schleife stabil?
Wurzelortskurve rootlocus; zeigt den Weg, den die Wurzeln nehmen, wenn man k erhöht
rlocus(G)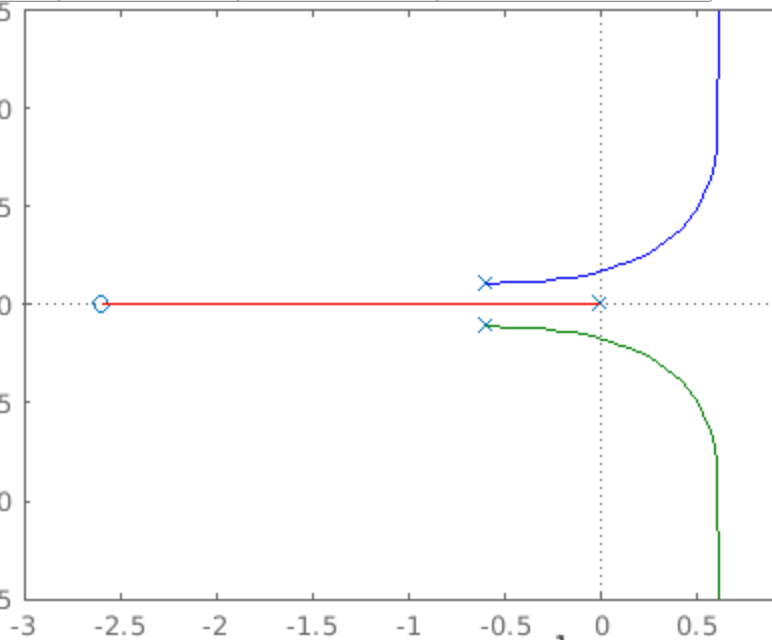
zeigt den Weg der Pole des geschlossenen Systems. die Kurven beginnen bei den Polen und enden in den Nullstellen oder im Unendlichen.
[r,k]=rlocus(G)
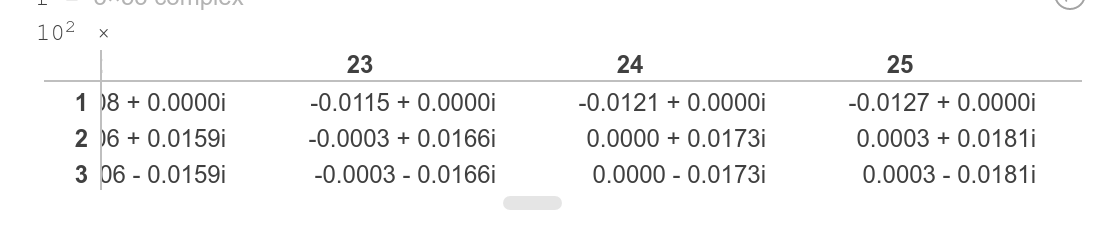
man findet den Durchgang durch die imaginäre Achse, wenn man in r Realteil==0 sucht (index 24)
k(24)
ans = 2.7832
man sieht: die maximale Verstärkung beträgt 2.78 d.h. k darf von 1 bis 2.78 variiert werden, es gibt also relativ viel Spielraum für den P Regler
LTSpice
Um diese Beurteilung in LTSpice zu simulieren muss bei geschlossener Regelschleife auf die offene Schleife zurückgerechnet werden. Dies wird im LTSpice-Beispiel openloop2 erklärt (in LTSpice verfügbar).
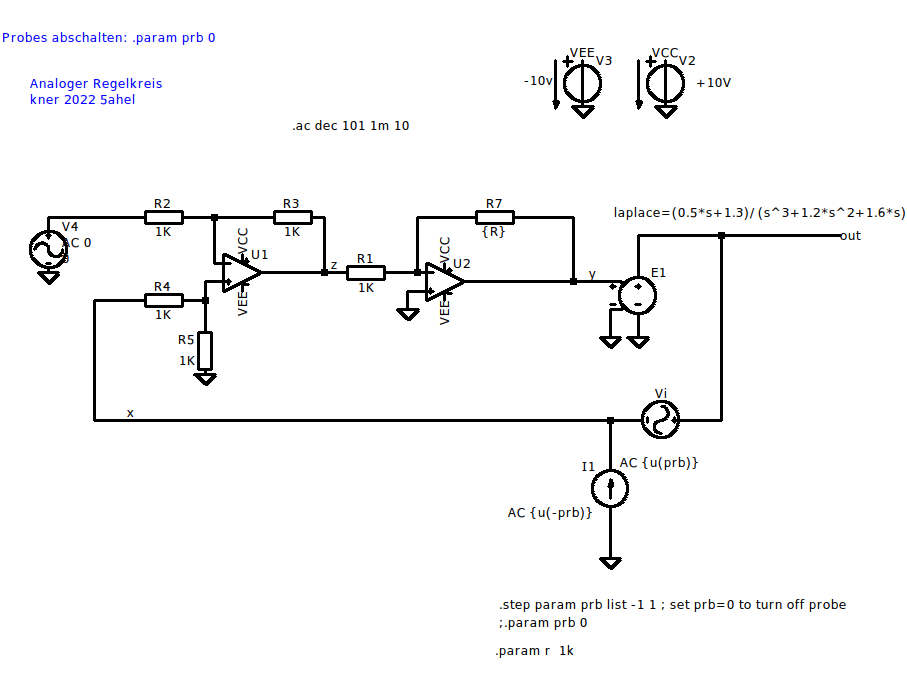
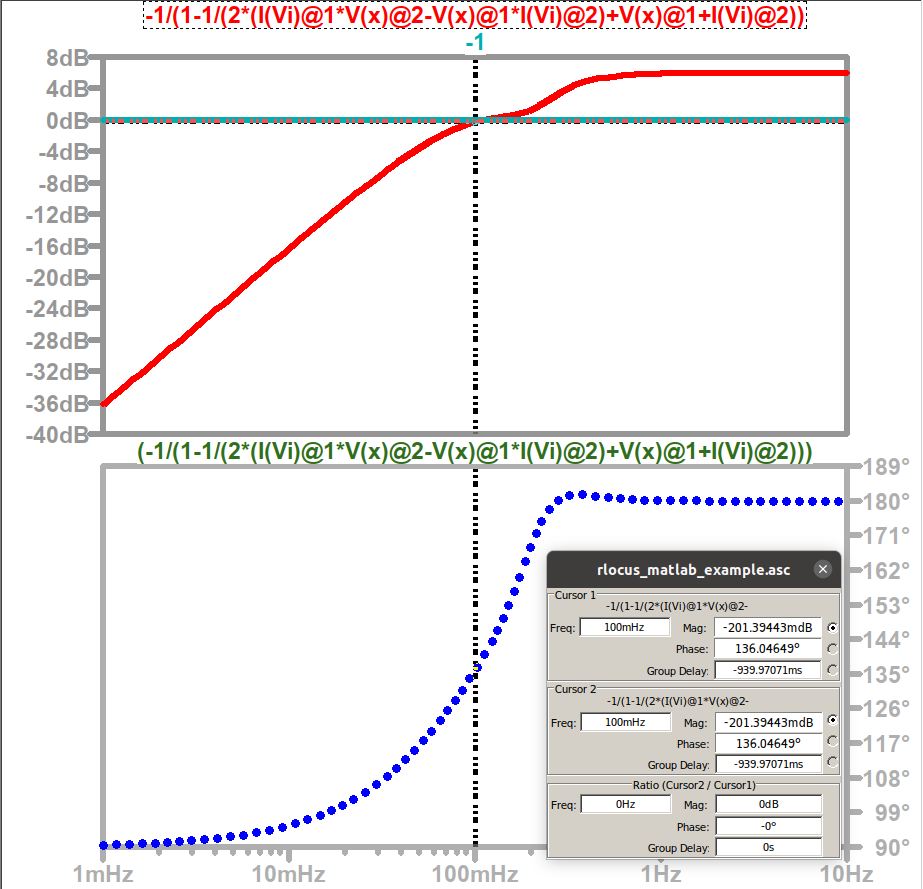
in dieser Simulation sieht man, dass bei k=1 der Schaltkreis stabil ist. ( Eigentlich ist hier k=-1, aber die Rückführung der Regelschleife wird beim + des Addierers eingespeist, daher muss k negativ sein).
Bei k=2 ist die Phasenreserve nur mehr 5°, bei k=2.78 ist sie 0, d.h. der Phasenwinkel der offenen Schleifenverstärkung ist 180°.
Bei k=3 ist der Regelkreis instabil.
Will man nun die Sprungantwort simulieren, so kriegt man eine Fehlermeldung: 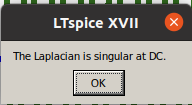 d.h. die Laplace-Beschreibung der Strecke hat einen Pol bei s=0 (f=0Hz, also Gleichstrom). Um dies zu bereinigen muss der Pol etwas nach links in der s-Domäne verschoben werden. Laplace=(0.5*s+1.3)/((s+0.1)*(s^2+1.2*s+1.6)).
d.h. die Laplace-Beschreibung der Strecke hat einen Pol bei s=0 (f=0Hz, also Gleichstrom). Um dies zu bereinigen muss der Pol etwas nach links in der s-Domäne verschoben werden. Laplace=(0.5*s+1.3)/((s+0.1)*(s^2+1.2*s+1.6)).
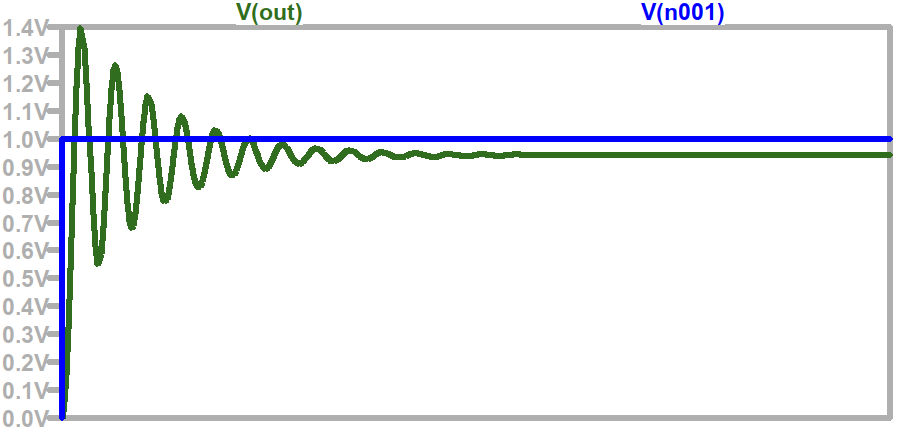
Sprungantwort für R=2k
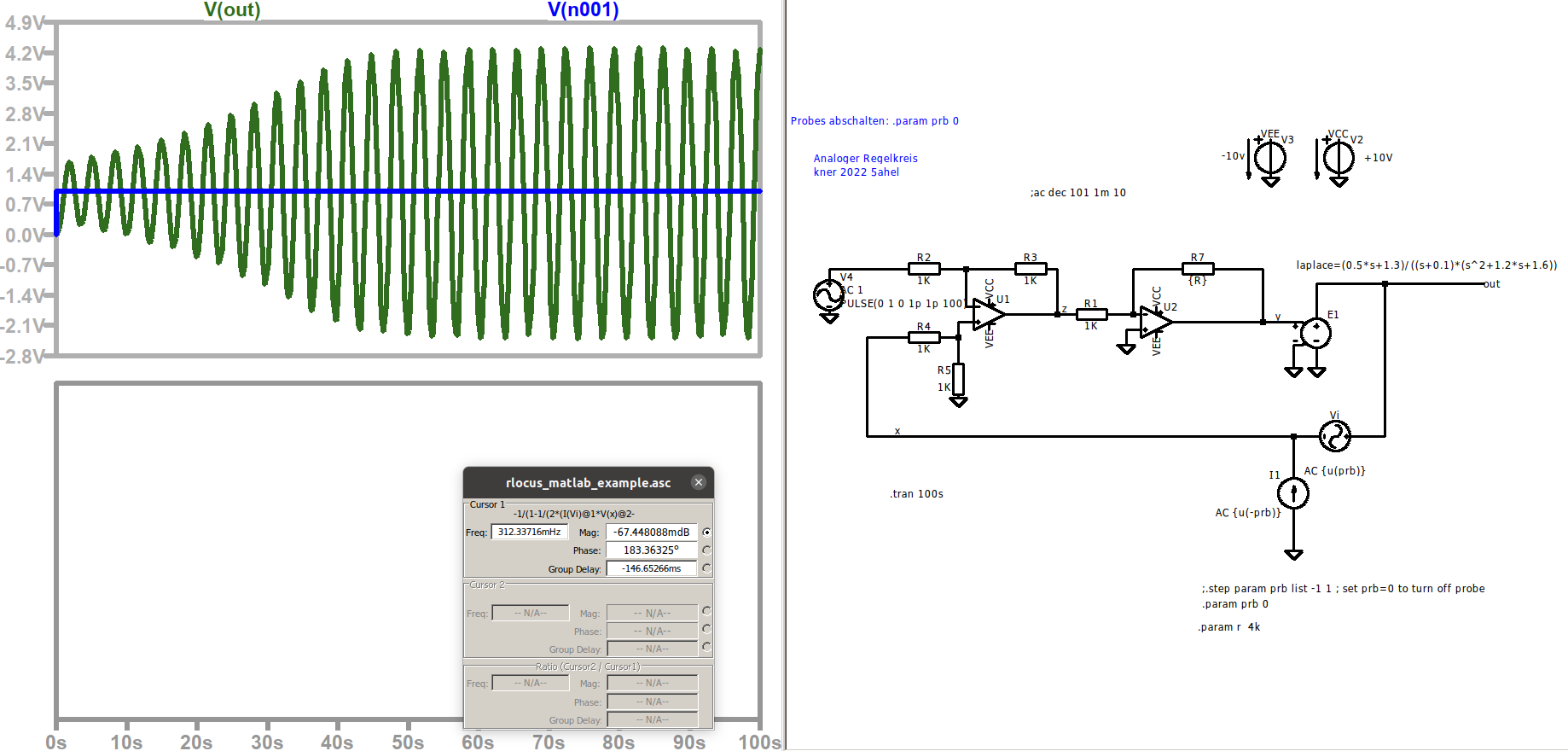
man sieht: bei R=4k ist die Sprungantwort instabil.