







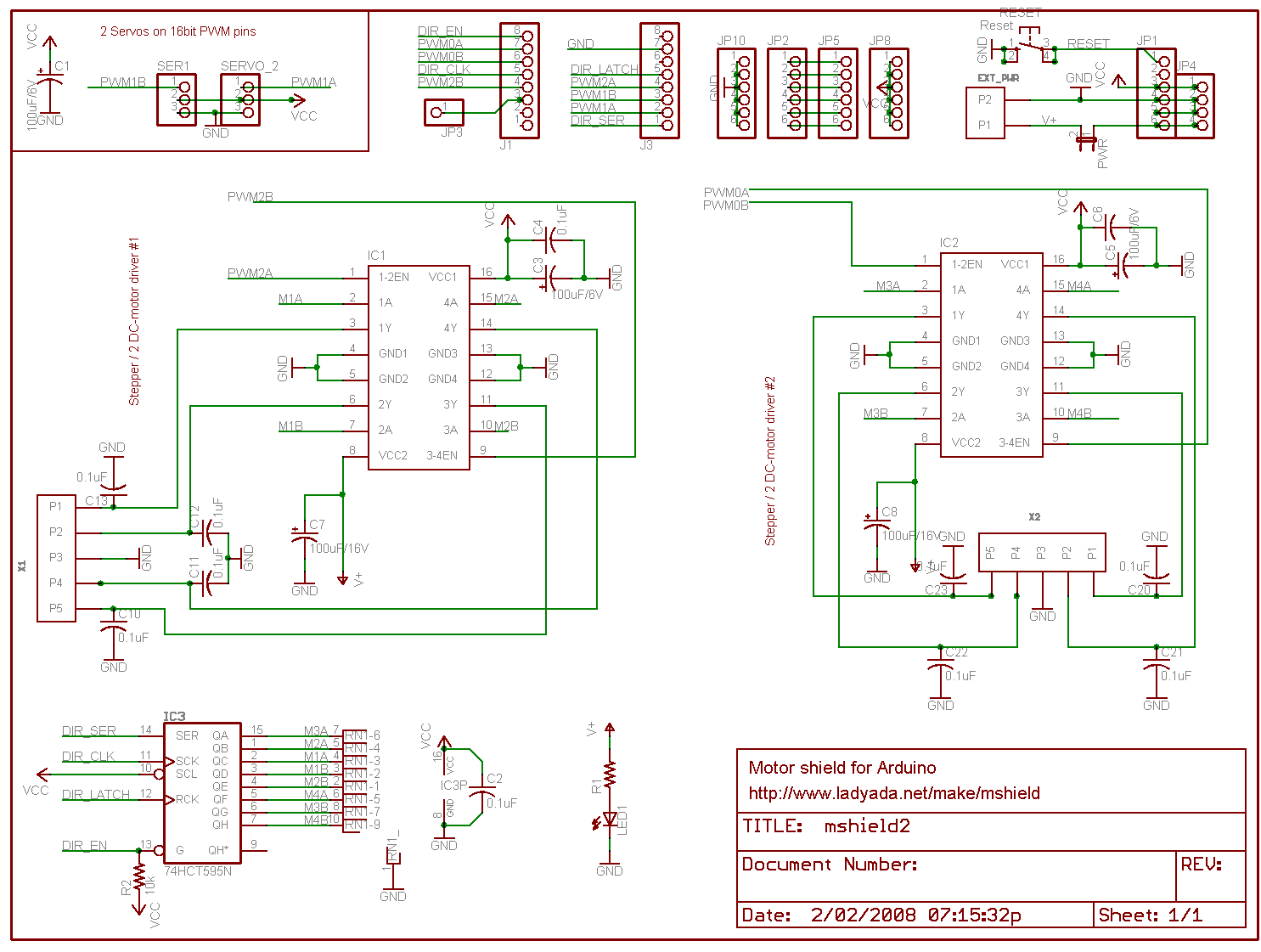
Arduino Motorshield
http://www.ladyada.net/make/mshield/index.html
Schematic: http://www.ladyada.net/images/mshield/mshieldv1-schem.png
Theorie
 Bipolar (4-Wire): die Spulen werden in beide Richtungen vom Strom durchflossen
Bipolar (4-Wire): die Spulen werden in beide Richtungen vom Strom durchflossen
Unipolor (6-Wire): die Spulen werden nur in eine Richtung vom Strom durchflossen


http://www.orientalmotor.com/stepper-motors/technology/unipolar-bipolar-connections.html
Signalisierung

{kind=link}
){kind=link}
1001 – 1100- 0110 – 0011 - ...
 Illustration 2: Halbschritt Modus
Illustration 2: Halbschritt Modus
1001-1000-1100-0100-...
Arduino Motorshield Inbetriebnahme
-
Jumper pWR abziehen und externe Versorgung für die Motoren an EXT_PWR anschließen
-
Motor auf M3 und M4 anschließen
-
Testprogramm durchlaufen lassen (vorwärts/rückwärts)
Unipolar-Motoren
Stepper Motor rSMR40-4814 ( ==> 48 Steps)
-
Rot … Mittelanzapfung
-
Schwarz/Braun Strang1 (S-Rot: 30 Ohm; Schw-Br: 60 Ohm)
-
Orange/Gelb Strang2
-
Ansteuerung: M3-M4 für Rechtsdrehung
// to motor port #2 (M3 and M4)
// M3 Schwarz/Braun/ M4 Gelb/Orange) Mittelanzapfung Rot Offen
AF_Stepper motor(48, 2);
Stepper Motor 42sim-24dcb ==> 24 Steps
-
Weiss … Mittelpunkt
-
// M3 blau/gelb/ M4 braun/rot) Mittelanzapfung weiß Offen
Fuji Electrochemical SMR40-4814-B
 http://domoticx.com/pinout-stappenmotor-fuji-electrochemical-smr40-4814-b/
http://domoticx.com/pinout-stappenmotor-fuji-electrochemical-smr40-4814-b/
The Future
L6470 and L6472: fully integrated stepper motor drivers;
The L6470 and L6472 are fully integrated motor drivers providing a complete standalone
solution for the high-end stepper motor applications. The devices can be controlled by a host microcontroller through a fast SPI interface and are able to execute a complete set of
motion commands.
-
L6470 voltage mode driving and the
-
L6472 advanced current control
Demoboards at ebay
adafruit/AFMotor Library
https://cdn-learn.adafruit.com/downloads/pdf/adafruit-motor-shield.pdf
Functions
AF_Stepper steppername(steps, portnumber)
steps 48 (48 Schritte je Umdrehung) portnumber 1(M1/M2) 2(M3/M4)
setSpeed(RPMspeed)
onestep(direction, stepstyle)
release()
STEP Valid values for 'style' are:
SINGLE - One coil is energized at a time.
DOUBLE - Two coils are energized at a time for more torque.
INTERLEAVE - Alternate between single and double to create a half-step in between. This can result in smoother operation, but because of the extra half-step, the speed is reduced by half too.
MICROSTEP - Adjacent coils are ramped up and down to create a number of 'micro-steps' between each full step. This results in finer resolution and smoother rotation, but with a loss in torque
adafruit/AccelStepper
Erweiterte Lib zur Ansteuerung mehrerer Stepper gleichzeitig; Beschleunigung usw.
Schematic
https://www.adafruit.com/product/81
{kind=link}
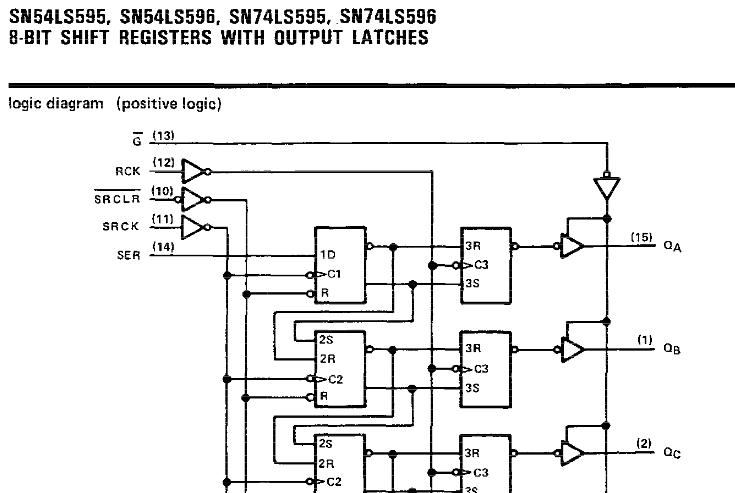
// Arduino pin names for interface to 74HCT595 latch
#define MOTORLATCH 12
#define MOTORCLK 4
#define MOTORENABLE 7
#define MOTORDATA 8
Links
Gutes Video: https://www.youtube.com/watch?v=TWMai3oirnM