







Timer
Table of Contents
Glitch Free, Phase Correct PWM (Symmetric PWM)
Output Compare Match / Waveform Generator
Begriffe
Timer/Counter
-
Timer zählt interne Takte
-
Counter zählt externe Takte (fallende/steigende Flanke ist wählbar)
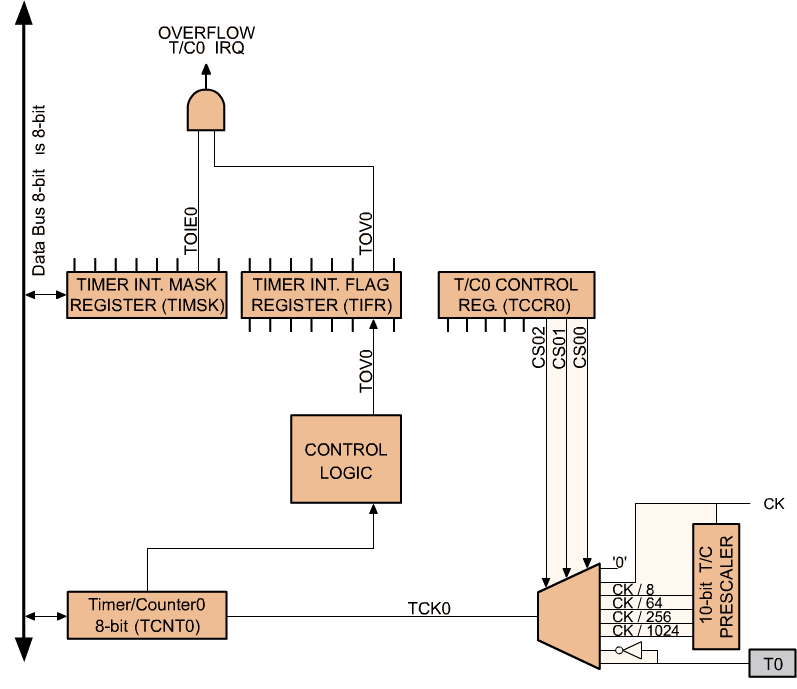
Prescaler
-
Teilerbaustein teilt den Takt herunter, damit die Timer nicht zu schnell zählen
-
Teilungsfaktoren: 1024, 256, 64, 8, 1 usw.
-
Auswahl des geteilten Taktes durch Multiplexer
Multiplexer
-
Auswahlbaustein
-
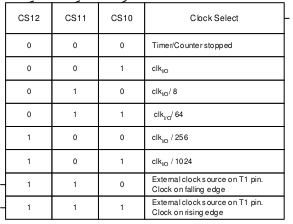
für die Auswahl 1-aus-8 werden 3 Steuerbits benötigt CS02, CS01, CS00 (clock select flags)
-
die Auswahl 0 wählt den Takt 0Hz d.h. der Timer bleibt stehen
Output Compare Units
-
vergleicht den Zählerstand mit einem Register und setzt eine Interrupt-Anfrage und/oder toggelt einen Pin
Double Buffered Register
-
der Inhalt wird nicht in das Original-Register sondern in ein Schattenregister geschrieben
-
z.B. 16Bit Zähler soll gesetzt werden: zuerst die beiden Bytes getrennt in das
Schattenregister schreiben und dann mit einem Schlag in das Zählregister übertragen
Clear Timer on Compare Match
-
wenn der Zählerstand mit dem Vergleichsregister matcht wird der Zählerstand automatisch auf Null zurückgestellt
PWM (pulse width modulation)
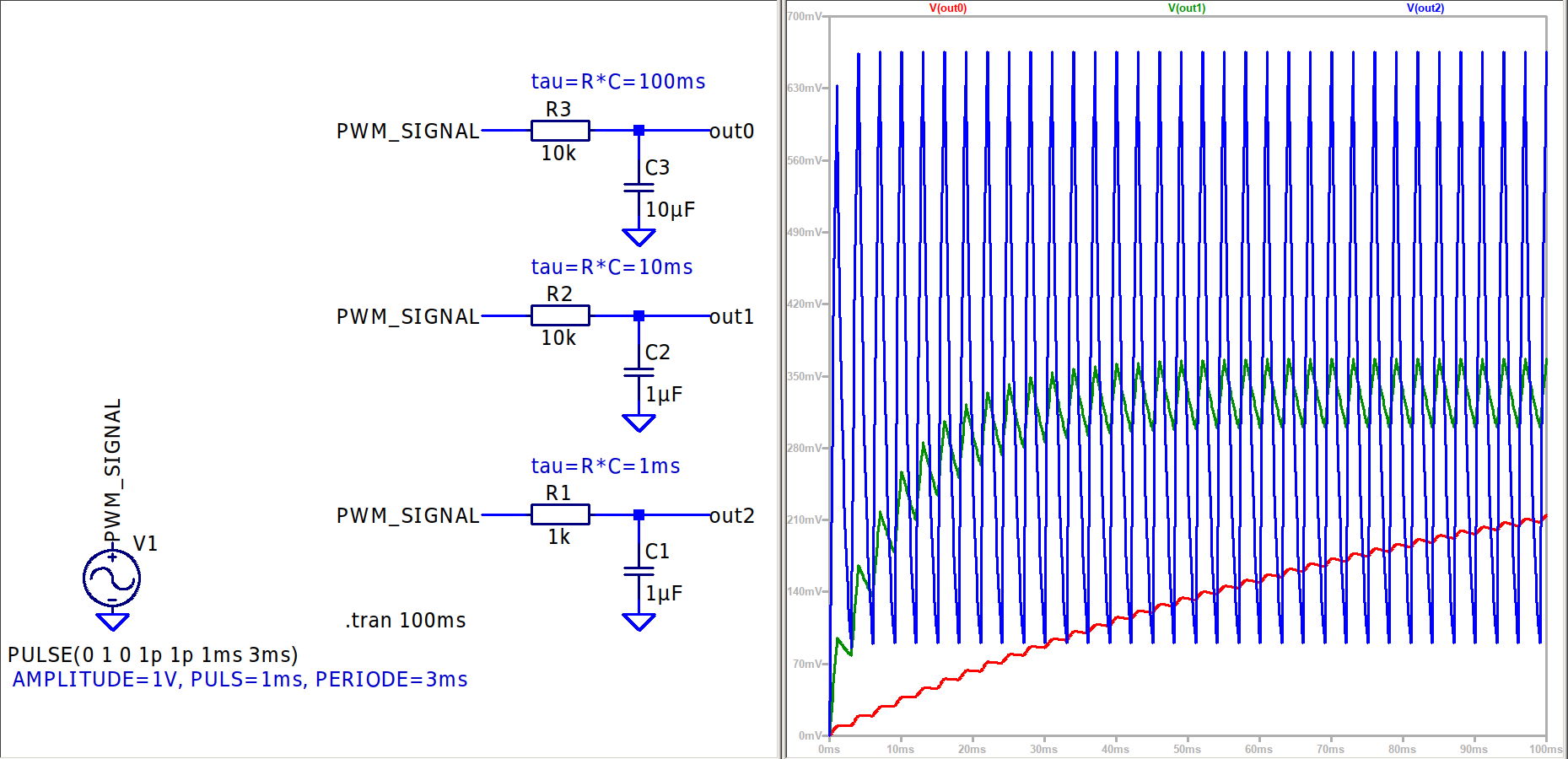
Mit PWM lassen sich analoge Spannungen erzeugen. Das Verhältinis von Pulsdauer zu Periodendauer bestimmt die erzeugte Gleichspannung. Die Gleichspannung ist der Mittelwert des Digitalsignals und kann durch ein einfaches RC-Glied erzeugt werden. Je geringer die Welligkeit, desto länger dauert es, bis sich der Gleichspannungswert einstellt.
-
die Simulation zeigt: je höher die Zeitkonstante tau im Verhältinis zur Frequenz der PWM, desto geringer die Welligkeit des Gleichsspannungs-Signals, desto länger dauert es aber, bis sich die Gleichspannung einstellt → höhere Frequenz der PWM ist erwünscht, dies ergibt geringere Anforderungen an den Ausgangstiefpass.
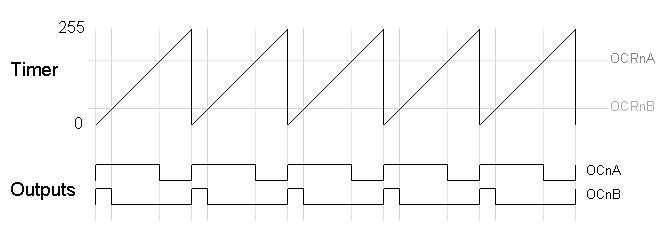
Fast PWM (Asymmetric PWM)
-
 Einfaches pulsweitenmoduliertes Signal; hohe Frequenz
Einfaches pulsweitenmoduliertes Signal; hohe Frequenz -
bei den dabei entstehenden höheren Frequenzen werden die externen Komponenten (C,L,R) billiger
-
beim Umschalten des Puls/Pausen-Verhältnisses entstehen Störungen (Glitches)
-
geeignet für Leistungsregelung, Gleichrichtung, DAC Anwendungen;
-
single Slope; Überlauf bei TOP (entweder 0xff oder OCR0A)
-
Nicht-invertierender Output: bei BOTTOM OCx Pin= 1, bei MATCH wird OCx Pin=0;
-
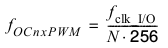
Die Frequenz ergibt sich aus den Überläufen des Timers der mit fosc=fclk_I/O zählt und dem Prescaler N z.B: fosc=16MHz → fOCnxPWM=62,5kHz
Glitch Free, Phase Correct PWM (Symmetric PWM)
-
Symmetrisch zur Mitte der Periode
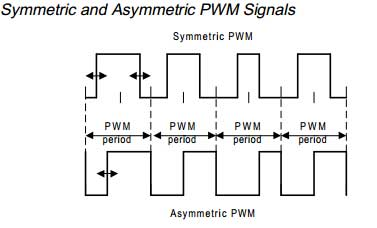
man sieht: symmetrisch/asymmetrisch bezogen auf die Mitte der Periode.
Beim Umschalten auf ein neues Puls/Pause-Verhältnis erzeugt die symmetrische Variante weniger Oberwellen (Störungen, Glitches) weil der Abstand der Pulse konstant bleibt, bei der asymmetrischen PWM ändert sich der Abstand der Pulse, das macht sich als Störung im Analogsignal bemerkbar.
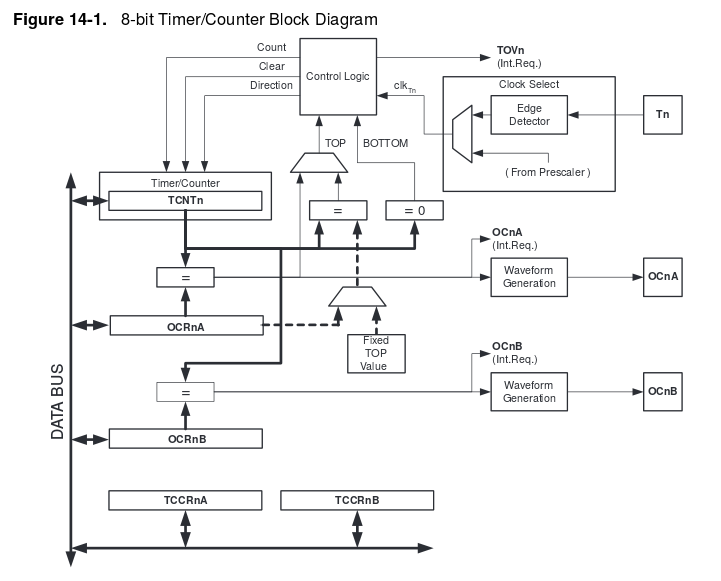
8-Bit Timer
Definition
BOTTOM: Zählerstand 0
MAX: Zählerstand 0xFF
TOP: höchster Zählerstand; normalerweise TOP=MAX,
aber es kann auch TOP=OCR0A eingestellt werden.
Betriebsarten
-
Normaler Zählerbetrieb
-
CTC (clear timer on compare)
-
PWM mode
Register
-
 Zählerstand: TCNT
Zählerstand: TCNT -
Kontrolle: TCCR
-
Interrupt-Request: TIFR
-
Interrupt-Enable: TIMSK
-
Output Compare: OCR
Mögliche Interrupt Flags:
-
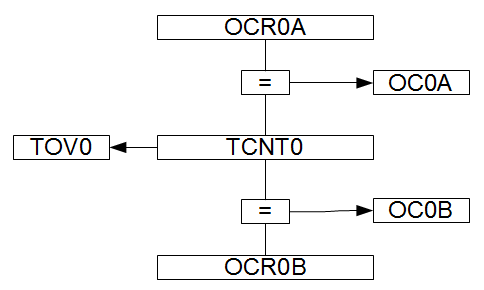
Overflow TOV0
-
Compare Matched OCnA, OCnB
Signale an den Zähler:
-
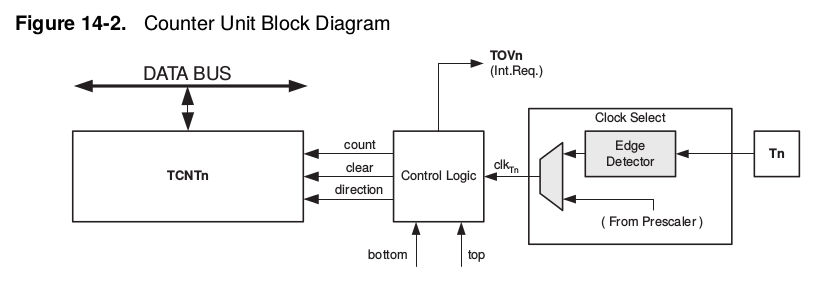 Clear
Clear -
Direction up/down
-
Clock: von Prescaler oder externem Pin
Der Zähler zählt bis 255 und läuft dann auf 0 über. Dabei setzt er ein Overflow-Flag und fordert einen Interrupt an. Wenn der Interrupt erlaubt ist wird die zugehörige ISR (Interrupt Service Routine) angesprungen.
Getaktet wird der Zähler (Timer1) extern oder intern und über die Flags TCCR1.CS12, TCCR1.CS11 und TCCR1.CS10 geteilt.
#include <avr/io.h>
#include <avr/interrupt.h>
int main(void)
{
TIMSK |= (1<<TOIE0); // Timer 0 overflow erlauben
TCCR0 = (1<<CS01); // Prescaler 8, Timer starten
sei();
while(1)
{
}
}
ISR (TIMER0_OVF_vect)
{
// ein Overflow ist aufgetreten
}
Beispiel: erzeuge einen Takt von ca. 1ms
mit dem Prescaler von 64 ergeben sich alle 1,024ms ein Overflow
#include <avr/io.h>
#include <avr/interrupt.h>
int main(void)
{
TIMSK0 |= (1<<TOIE0); // Timer 0 overflow erlauben
TCCR0B = (1<<CS01)|(1<<CS00); // Prescaler 64
sei();
while(1)
{ volatile int dummy;
}
}
ISR (TIMER0_OVF_vect)
{
// ein Overflow ist aufgetreten
Beispiel: Toggle ca. alle 1ms den Pin PC0 (fosc=1MHz)
Tosc=1us → 1000 Zyklen → Prescaler = 8 → 1000/8= 125 Zyklen
Treload = 256-125=131
In der Praxis ergibt sich ein Fehler von ca. 15us dadurch, dass der Einsprung in die Serviceroutine sowie die Abarbeitung der Serviceroutine jeweils ein paar Zyklen brauchen. (Reloadwert=130 passt besser)
#include <avr/io.h>
#include <avr/interrupt.h>
int main(void)
{
TIMSK0 |= (1<<TOIE0); // Timer 0 overflow erlauben
TCCR0B = (1<<CS01); // Prescaler 8, Timer starten
sei();
while(1);
}
ISR (TIMER0_OVF_vect)
{
TCNT0 = 131;
}
Output Compare Match / Waveform Generator
Begriffe:
-
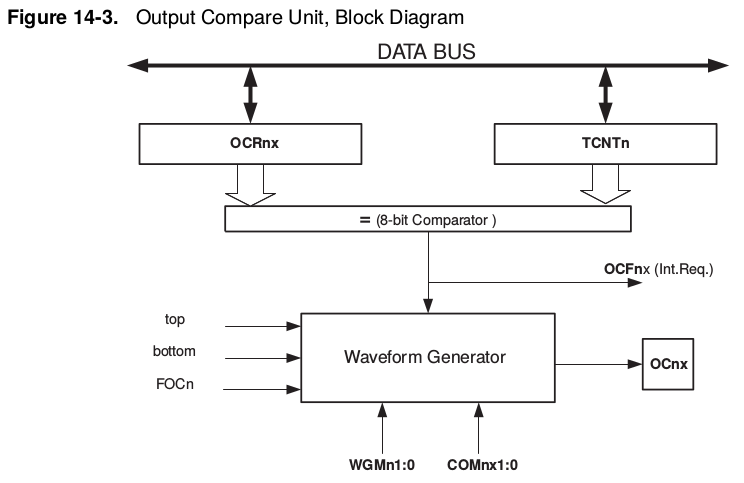 OCRn … Output Compare Value Register n (OCR0)
OCRn … Output Compare Value Register n (OCR0) -
OCFn … Request Flag Output Compare; wird automatisch gelöscht, wenn ISR exekutiert wird (oder softwaremäßig durch Schreiben einer 1)
-
FOCn … Force Output Compare ( löst keinen Interrupt aus, setzt auch den Timer nicht zurück, wirkt aber auf den Ocnx Pin)
-
Ocnx … an diesem Pin wird das Timing erzeugt
-
WGMn1:0 … Waveform Generator Mode Normal, PWM (Fast, Phase Correct)
-
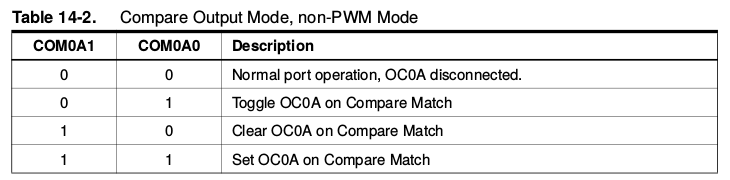
COMnx1:0 Waveform-Generator: definieren den Zustand von Ocnx beim nächsten Match und die Quelle für den OC0x Pin
Double Buffering
Doppelte Pufferung: die CPU greift auf das Schattenregister von OCR0x.
Normalbetrieb: die CPU greift direkt auf OCR0x zu.
Doppelte Pufferung synchronisiert das Update der OCR0x Register zu TOP bzw. BOTTOM der Zählsequenz. Dies verhindert unsymmetrische PWM Signale => Glitch-Free Output d.h. wenn man das OCR0x Register ändert wird es nicht sofort gesetzt, sondern erst nachdem z.B TOP erreicht wurde.
Erzeugen von Timings
Am Pin PB0 soll folgendes Timing erzeugt werden:

Idee: der Timer wird mit einem Wert geladen, so dass er nach 5ms überläuft. Dies löst einen Interrupt aus. In der ISR wird der Wert auf 3ms umgestellt usw.
Taktrate des Oszillators: 16MHz Tosc=62.5ns: Überlauf beim Zählerstand 255 d.h. nach 256 Zyklen, also alle 256*62.5ns = 16µs. Viel zu schnell. Wenn man den Takt herunterteilt ergeben sich:
|
Teiler |
Periode des Taktes |
Überlauf nach 256 Zyklen |
|
1 |
62.5ns |
16µs |
|
8 |
500ns |
128µs |
|
64 |
4µs |
1.024ms |
|
256 |
16µs |
4.096ms |
|
1024 |
64µs |
16.384ms |
Man sieht: für ein Timing von 5ms eignet sich bei 8Bit und 16MHz nur der Teiler 1024. Ein Zählschritt dauert dann 64µs. Die gewünschten 5ms entsprechen daher 78.125 Taktperioden. Das Timing ist also nicht genau erreichbar.
Der Zähler wird nicht bei Null, sondern so gestartet, dass er nach 5ms überläuft. Der Wert dafür (preload value) ist 256-78 = 178.
Nachteil dieser Methode: das Laden der Timer in der ISR benötigt zusätzliche Rechenzeit und ändert daher das Timing leicht.
#define F_CPU 16000000
#include <avr/io.h>
#include <avr/interrupt.h>
#define LED 0
#define PRELOAD_5MS 0x100 - 78
#define PRELOAD_3MS 0x100 - 47 //Timer overflow after 3 ms @16MHz
void setup();
int main(void){
setup();
sei();
while(1);
}
void setup(){
// div 1024 ==> CS0=5
TCCR0B |=_BV(CS02)|_BV(CS00);
TIMSK0 |= _BV(TOIE0); //int enable
DDRB |= _BV(LED);
}
ISR(TIMER0_OVF_vect){
PORTB ^= _BV(LED); //Toggle Pin
if (PORTB & _BV(LED))
TCNT0 = PRELOAD_5MS; //no need to stop counter (8bit operation)
else
TCNT0 = PRELOAD_3MS;
}
Auto Reload: CTC (clear timer on compare match)
-
 Register OCR0A setzen
Register OCR0A setzen -
Wenn der Zählerstand den Wert OCR0A erreicht hat und überläuft, wird wahlweise ein Pin (OC0A) gesetzt (Null, Eins, Toggle) und/oder ein Interrupt ausgelöst
-
Die Pins OC0A (bzw. OC0B) müssen als OUTPUT konfiguriert werden.
Beispiel: alle 8192us soll der Ausgang OC0A toggeln: fosc=16MHz
#include <avr/io.h>
#include <avr/interrupt.h>
void setup(){
DDRD=(1<<PORTD6); //OC0A pin is output
TCCR0A |= (1<<COM0A0); // toggle OC0A Pin (PIND6)
TCCR0A |= (1<<WGM01); // CTC Mode
TCCR0B=(1<<CS02) | (1<<CS00); // prescal 1024
TCNT0=0x00;
OCR0A=0x7F; // nach T=62.5ns*1024*128 = 8192ms compare match
// Timer/Counter 0 Interrupt(s) initialization
TIMSK0 |= (1<<OCIE0A) | (1<<TOIE0);
}
int main(void){
setup(); sei(); while (1);
}
ISR(TIMER0_OVF_vect) {
// never reached
volatile static int i; i++;
}
ISR(TIMER0_COMPA_vect){
// count the compare matches
volatile static int i; i++;
}
PWM
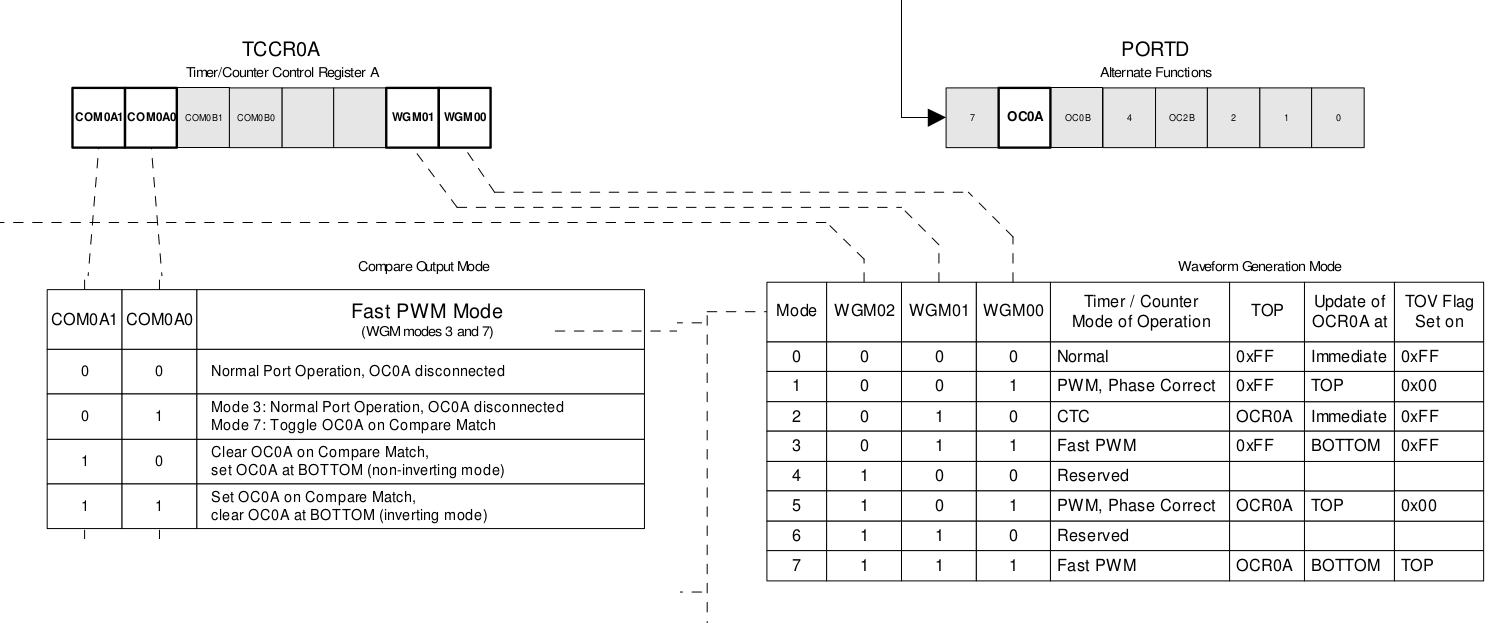 1. FAST PWM 3 (WGM01=WGM00=1 in Register TCCR0A)
1. FAST PWM 3 (WGM01=WGM00=1 in Register TCCR0A)
2. Non-Inverting Mode (COM0A1=1 in Register TCCR0A)
3. Compare Register (OCR0A) als Schaltschwelle setzen
4 Timer starten (Bit CS00 in Register TCCR0B setzen)
Interrupt
1. erlauben (Bit OCIE0A in Register TIMSK0 setzen)
2. ISR(TIMER0_COMPA_vect){}
3. sei()
#include <avr/io.h>
#include <avr/interrupt.h>
void setup(){
DDRD=(1<<PORTD6); //OC0A pin is output
TCCR0A |= (1<<WGM01)|(1<<WGM00); // Fast PWM Mode
TCCR0A |= (1<<COM0A1); // noninverting PWM (PIND6)
TCCR0B=(1<<CS00); // prescal 1
OCR0A=256/2; // 50% duty cycle
// Timer/Counter 0 Interrupt(s) initialization
TIMSK0 |= (1<<OCIE0A) | (1<<TOIE0);
}
int main(void){
setup(); sei(); while (1);
}
ISR(TIMER0_OVF_vect) {
// timer overflow interrupt service routine
}
ISR(TIMER0_COMPA_vect){
// compare match
}
Timer1 16Bit
-
Count und Compare Register sind 16 bit
Lesen und Schreiben aber sind 8 Bit Operationen
High-Byte wird in Schattenregister zwischengespeichert
beim Schreiben/Lesen auf CNT Register wird das Schattenregister verwendet um z.B: beim Lesen den richtigen Zählerstand zwischenzuspeichern.
Schreiben: zuerst das High-Byte, dann das Low-Byte
Lesen: Zuerst das Low-Byte, dann das High-Byte
nur in Assembler wichtig; in C wird das durch den Compiler automatisch richtig gemacht
...
; Write TCNT1 (0x03FA)
ldi r17,0x03
ldi r16,0xFA
out TCNT1H,r17
out TCNT1L,r16
; Read TCNT1 into r17:r16
in r16,TCNT1L
in r17,TCNT1H ...
Input Capture (Timer1 only)
-
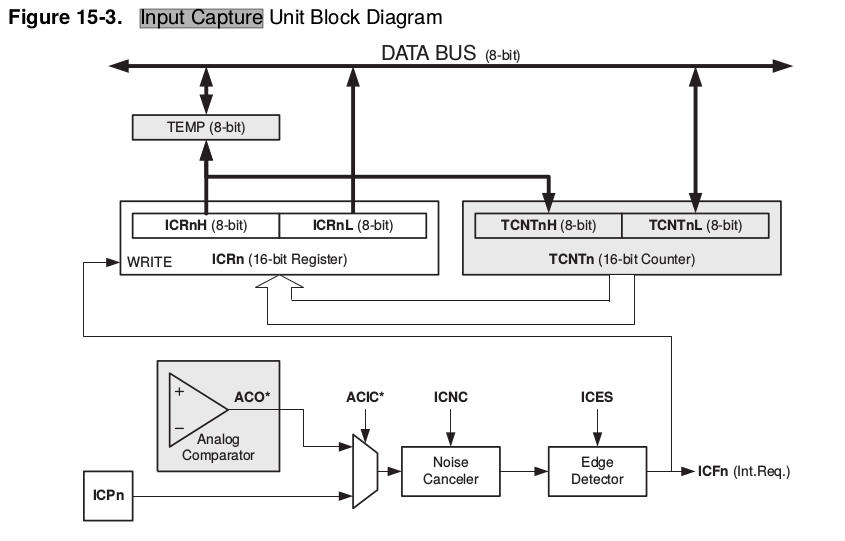 ICP Pin oder Analoger Komparator löst Capture des 16Bit Timers aus
ICP Pin oder Analoger Komparator löst Capture des 16Bit Timers aus -
Ein Edge-Detektor erkennt steigende/fallende Flanke und löst aus
-
das 16Bit Register ICR1 nimmt den Zählerstand auf
-
ein Interrupt-Requestflag wird gesetzt und automatisch beim Einstieg in die ISR gelöscht
-
Noise Cancellation verzögert das Capture Signal um 4 Systemtaktzyklen (4x das gleiche Signal hintereinander bevor eine Änderung akzeptiert wird).
Timer Counter ATMEGA328p
Qellen
http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial/Die_Timer_und_Z%C3%A4hler_des_AVR
Template für ATMEL Studio 6.2 Counter0.zip