







Digitales Potentiometer
Verwendete Pin-Nummern findet man unter hardware/arduino/variants
z.B: für das Board Duemilanove: SS = 10 (Chip-Select), MOSI = 11 (Master Out/Slave In),MISO=12, SCK = 13
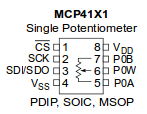
MCP 4151-104E/P
http://pdf1.alldatasheet.com/datasheet-pdf/view/305851/MICROCHIP/MCP4151T.html
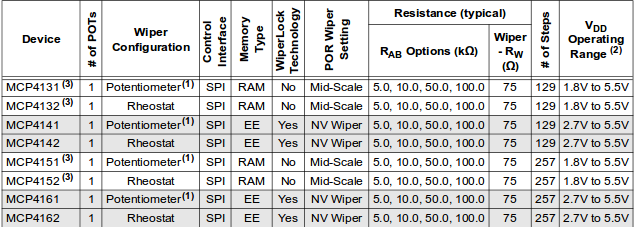
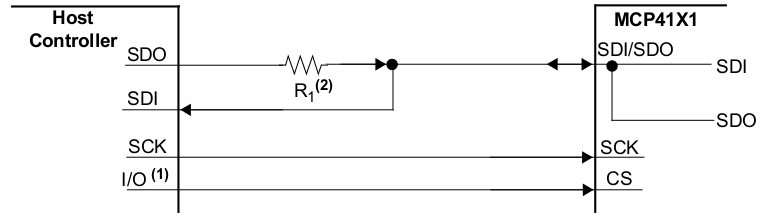
Wahl des R1: 1kOhm (10kOhm war zu hochhohmig, konnte den internen Pullup im MCP41X1 nicht überschreiben; je niederohmiger desto schneller wird der Bus


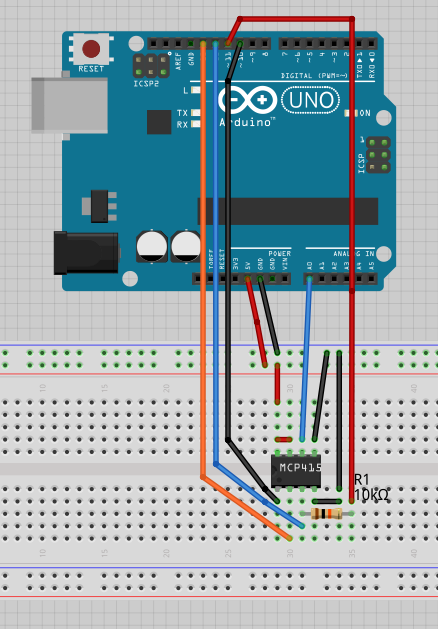
Fritzing-Verdrahtungsplan; Achtung: Pin A vom MCP4151 sollte auf VCC und Pin B auf GND verdrahtet werden, hier sinkt bei steigendem Digital-Wert die Spannung am Wiper Ausgang. Der Widerstandswert mit 10k ist zu hoch: es gelingt damit nicht, gegen den inneren Pullup den Pegel auf Null zu ziehen.
/*
kner 2013 MCP4151 Digital Poti
Pin 5(A) - Full Scale End - connect this to VDD
Pin 6(W) - wiper - connet to Analog In A0
Pin 7(B) - GND
Pin 1(CS) - arduino pin 10 (SS pin)
Pin 3(SDI/SDO) - arduino pin 11 (MOSI pin) via resistor for writing to poti
Pin 3(SDI/SDO) - arduino pin 12 (MISO pin) direct for reading from poti
Pin 2(SCK) - arduino pin 13 (SCK pin)
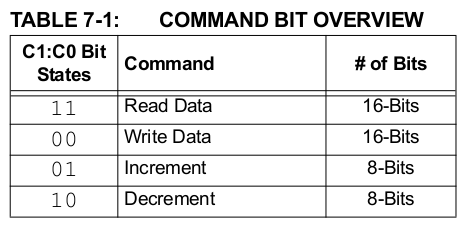
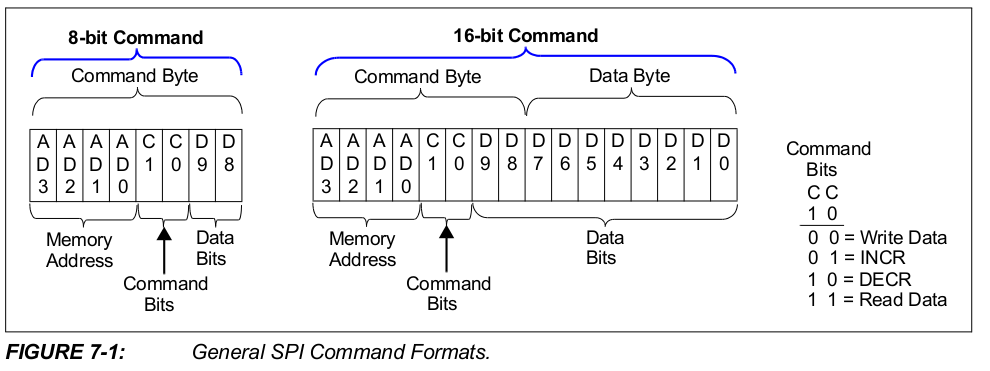
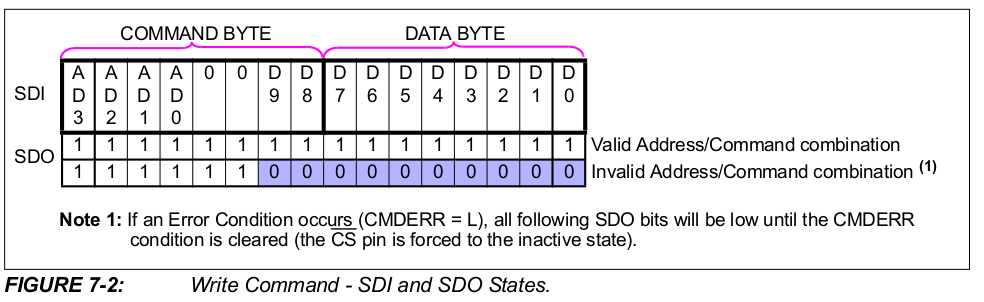
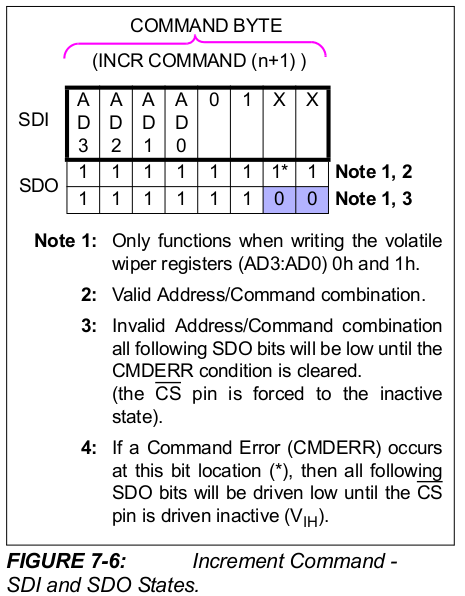
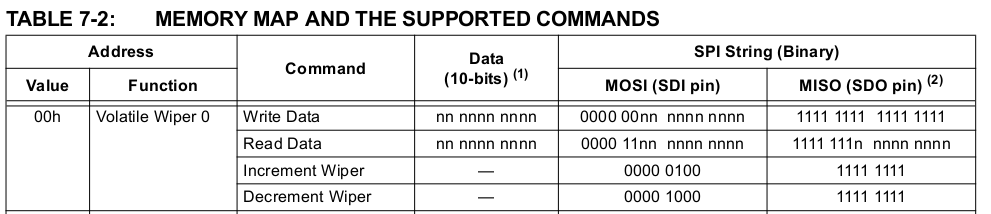
data frame
increment: 1 byte 0000 0100
decrement: 1 byte 0000 1000
write value: 2byte 0000 00dd dddd dddd values from 0x00 to 0x100
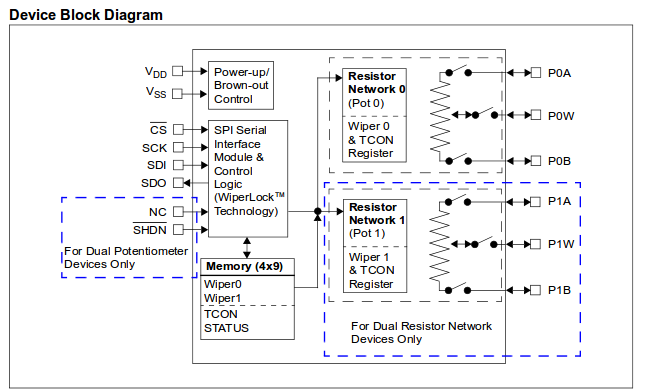
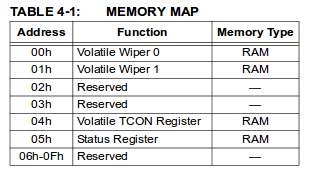
read status register (address 5): 2 byte 0101 1100 xxxx xxdx - bit 1 = hardware shutdown bit;
a shutdown disconnects pin A and sets the wiper to B
tcon register (address 4): can connect/disconnect terminals(A,B,W) and hardware-shutdown(HW) the device
9 bits: 1 1111 R0HW-R0A-R0W-R0B bit 8 - bit 4 not used/
to shutdown: 0000 0001 1111 0111 (bit 9 is not used)
to disconnect A: 111111011
*/
// inslude the SPI library:
#include <SPI.h>
#include <avr/io.h>
// set pin 10 as the slave select for the digital pot:
const int slaveSelectPin = 10;
void setup() {
Serial.begin(9600);
pinMode (slaveSelectPin, OUTPUT);
SPI.begin();
SPI.setClockDivider(SPI_CLOCK_DIV128); //depends on resistors
}
void loop() {
Serial.print("Max: ");
//after POR: wiper is in the middle
digitalPotWrite(0x100); //Maximum
Serial.println(analogRead(A0));
delay(3000);
//Shutdown output should be 0
Serial.print("Shutdown:");
digitalPotWrite16Bit(0x40F7);
Serial.println(analogRead(A0));
Serial.print("Status:");
Serial.println(digitalPotReadControlregister(),HEX); // did it work?
// i am not successful in reading register 5 (Status Register)
//reactivate after Shutdown
Serial.print("Finish shutdown:");
digitalPotWrite16Bit(0x40FF);
Serial.println(digitalPotReadControlregister(),HEX);
Serial.print("Min: ");
digitalPotWrite(0x0); //Minimum
Serial.println(analogRead(A0));
delay(3000);
Serial.println("inc: ");
for (int level = 0; level < 257; level++) {
digitalPotInc();
Serial.println(analogRead(A0));
delay(10);
}
Serial.println("dec: ");
//decrement
for (int level = 0; level < 257; level++) {
digitalPotDec();
Serial.println(analogRead(A0));
delay(10);
}
Serial.println("inc level: ");
for (int level = 0; level < 257; level++) {
digitalPotWrite(level);
Serial.println(analogRead(A0));
delay(10);
}
Serial.println("dec level: ");
for (int level = 257; level >0; level--) {
digitalPotWrite(level);
Serial.println(analogRead(A0));
delay(1);
}
while(1);
}
void digitalPotInc() {
digitalWrite(slaveSelectPin,LOW);
SPI.transfer(4);
digitalWrite(slaveSelectPin,HIGH);
}
void digitalPotDec() {
digitalWrite(slaveSelectPin,LOW);
SPI.transfer(8);
digitalWrite(slaveSelectPin,HIGH);
}
void digitalPotWrite(int value) {
digitalWrite(slaveSelectPin,LOW);
SPI.transfer((value>>8)&0b00000001); //high byte least significant bit
SPI.transfer(value & 0xff);
digitalWrite(slaveSelectPin,HIGH);
}
void digitalPotWrite16Bit(int value) {
digitalWrite(slaveSelectPin,LOW);
SPI.transfer(value>>8); //the short way also works
SPI.transfer(value);
digitalWrite(slaveSelectPin,HIGH);
}
uint16_t digitalPotReadControlregister() {
digitalWrite(slaveSelectPin,LOW);
int highbyte = SPI.transfer(0x4F);
int lowbyte = SPI.transfer(0xFF);
digitalWrite(slaveSelectPin,HIGH);
return highbyte*256+lowbyte;
}